Signal&System Conclusion Chapter01-03
信号与系统 chapter 01-03 总结归纳
Tips:本博客中设计大量 Latex 公式,需要在浏览器中安装相应的插件支持 Latex 公式的显示
Chapter 01:
简单来说,章节一简单的介绍了一下什么是信号、什么是系统。以及介绍了一些常见的信号变化方式。那么我们需要关注的就是信号的分类,以下是几个非常重要的信号分支:
- 连续信号\离散信号
- 周期信号\非周期信号
第一类与第二类的信号可以相互组合,总共四种:
- 连续周期
- 连续非周期
- 离散周期
- 离散非周期
后续讨论的一切信号处理皆建立在这四类信号的基础上。不同的信号时域、频域的转换以及表现都不相同,对信号变化的响应也不相同。在这四种信号类型之外,介绍了一些常见的信号,如指数信号、正弦信号,表达式如下:
$$ x(t) = Ae^{j\omega t} $$
经过欧拉公式变形后,信号的表现形式如下:
$$ x(t) = A(cos\omega_{0} t + j sin\omega_{0} t) $$
可以发现,复指数信号是一个周期函数且可以展开为三角函数的形式,这也为我们后面的讨论定下了基础。其中 A 表示为信号的幅值,而 $ \omega_{0} $ 表现了信号的振荡速度即在复平面内的旋转速度。上述信号为连续信号,因此我们可以发现当$ \omega_{0} $持续增大时,对应振荡速率也在不断增大,周期不断减小。周期为 $ T = \frac{2\pi}{\omega_{0}} $
那么我们观察一下离散的复指数信号:
$$ x[n] = Ae^{j\omega n} $$
如果我们将$ \omega_{0} $不断增大到$ \omega_{0} + 2\pi $时,你会发现由于$ n $只能为整数,所以$ e^{j2\pi n} $的值恒为1,这也表示离散信号的频率不能无限增大,离散信号的$ \omega_{0} $只能在范围$ 0-2\pi $或者$ (-\pi)-\pi $。这里体现了连续信号与离散信号之间的区别。除此之外,连续时间的复指数信号恒为周期信号,而离散信号由于n只能取整数点,因此是否是周期信号还取决于$ \omega_{0} $的取值,$ N = \frac{m2\pi}{\omega_{0}} $必须为正整数才能是周期信号。
其次介绍了一些常见的信号时域上的变化,如平移、尺度变换、时间反转等,详见如下:
- 反转: $ x(-t) = x^{*}(t) $;信号在时域上反转
- 尺度变换: $ x(at) $;当$ a > 1 $时相当于加速,信号时域上压缩;$ a < 1 $时相当于减速,信号时域上拉长
- 平移: $ x(t - T_{0}) $;信号在时域上左右平移,$ T_{0} $为平移后原信号零时刻的位置。
- 信号的分解:任何一个信号都可以分解为一个奇信号和一个偶信号的和。$ Odd{x(t)} = \frac{1}{2}(x(t) - x(-t)) $;$ Even{x(t)} = \frac{1}{2}(x(t) + x(-t)) $
通常来说,信号的变化会将反转,平移以及拉伸变换一起进行考察。我们将反转、拉伸定义为变换一,将平移定义为变换二。那么有两种变化顺序:
- 顺序一:先一后二 -> $ A(t - t_{0}) $;先对时域做伸缩或者反转,再在变化后的时间轴上进行平移。
- 顺序二:先二后一 -> $ At + t_{0} $;先在时间轴上进行平移,再对时域做伸缩或者反转。因为是以y轴为对称的变化,而根据平移的特点,$ t_{0} $就是平移后的原点位置,因此不需要对$ t_{0} $伸缩或反转。
之后介绍了两个全新的信号,阶跃信号$ u(t) $和单位冲激信号$ \delta(t) $。阶跃信号在$ t = 0 $时取值为1,在$ t < 0 $时取值为0,在$ t > 0 $时取值为1。单位冲激信号在$ t = 0 $时取值为1,在$ t \neq 0 $时取值为0。且阶跃信号是单位冲激信号的积分。单位冲激信号是阶跃信号的微分。离散信号与连续性质相同。
接着介绍了系统的一些特性,详见如下:
- 记忆性:系统当前时刻的输出与过去时刻的输入有关。无记忆就是指当前输出只与当前输入有关。
- 可逆性:系统的输出与输入的关系是可逆的。存在另一个系统能将前一个系统的输出作为输入,将前一个系统的输入作为输出。
- 因果性:系统的输出只与当前时刻的输入和过去时刻的输出有关。当前时刻的输出不能够预测未来时刻的输入。
- 稳定性:有界的输入得到的是有界的输出。
还有常见的两个特殊系统:
- 线性系统:系统的输出只与输入的线性组合有关。包括可加性和齐次性。输入的加权求和输入系统得到的是对应输出的加权求和输出。
- 时不变系统:输入的延迟输入系统得到的是对应输出的延迟输出。
Chapter 02:
第二章中介绍了一个重要的运算:卷积。以及对于一个线性时不变系统,输入一个信号如何得到对应的响应。
首先从离散信号开始,我们发现离散信号可以用一系列的加权冲激信号表示。$ x[n] = \sum_{k=-\infin}^{+\infin}\delta[n - k] * x[k] $。这个式子表示对于一个选定的n当且仅当k为n时,$ \delta[n - k] $才有值,否则为0。那么我们可以将$ \delta[n - k] $看作是一个冲激信号,那么$ x[n] $就可以看作是一系列的冲激信号的加权和。
既然一个离散信号我们可以表示为一系列加权脉冲的求和,那么要是我们知道一个线性时不变系统对一个单位脉冲信号的响应,则对于所有的信号的响应可以变成一系列加权脉冲响应的求和。这样我们实现了求一知N。公式表达如下:
$$ y[n] = \sum_{k=-\infin}^{+\infin}h_{k}[n] * x[k] $$
$ h_{k}[n] $表示时移为k的单位脉冲响应。又系统是时不变的,所以单位冲激信号时移后的响应等于单位冲激信号的响应的时移。因此我们可以将公式简化为:
$$ y[n] = \sum_{k=-\infin}^{+\infin}h[n - k] * x[k] $$
那么我们就将卷积运算的定义推演出来了,这个公式表达为一个平移从$ -\infin $到$ +\infin $的脉冲串求响应,再乘上$ x[k] $对应位置的权值,最后求和。那么我们怎么才能更好的记住这个公式呢?先将原信号的变量变为$ k $,再将单位冲激响应反转$ h[k] $变为$ h[-k] $,最后将响应平移到$ -\infin $处开始从左向右平移$ h[-k] $变为$ h[n-k] $,对于每一个n值都要将$ h[n-k] $与$ x[k] $对应位置的权值相乘,最后求和。这样就得到了我们完整的响应$ y[n] $。
粗略的我们将卷积公式记为:$ y[n] = x[h] * h[n] $;完整的计算公式为 $ y[n] = \sum_{k=-\infin}^{+\infin}h[n - k] * x[k] $。
线性时不变系统中的卷积运算满足一些运算的性质:
- 交换律:$ x[n] * h[n] = h[n] * x[n] $
- 结合律:$ (x[n] * h[n]) * h[n] = x[n] * (h[n] * h[n]) $
- 分配律:$ x[n] * (h[n] + h[n]) = x[n] * h[n] + x[n] * h[n] $
- 无记忆:当前信号的响应只与自身有关,根据卷积计算公式可得单位冲激响应只能是 $ h[n] = K\delta[n] $。
- 可逆性:存在逆单位冲激响应使得$ h_{1}[n] * h[n] = \delta[n] $。
- 因果性:当且仅当$ h[n] $只在 $ t > 0 $的时候不为零。
- 稳定性:单位冲激响应绝对可积,则说明系统的输出必然有界。这是离散线性时不变系统稳定的充要条件。
第二章还介绍了如何求解微分方程和差分方程描述的因果线性时不变系统的响应。对于线性常系数微分方程描述的系统,其输出通常是一个特解和一个通解的线性组合。我们通常假设通解为指数函数的形式代入微分方程,根据初始系统的零响应(初始松弛条件),即$ y(0) = 0 $或$ y[0] = 0 $。差分方程的求解过程类似,但是特殊的,由于离散时间所以是有限个点,因此在初始条件已知的情况下我们可以通过递归求得最终输出。例如
$$ y[n] - \frac{1}{2}y[n-1] = x[n], x[n] = K\delta[n] $$
当$ n < 0 $时,系统的输入为零。因此,我们可以通过递归的方式求得$ y[n] $的值。
对于一些复杂的一阶微分或差分方程,我们可以通过系统框图来表示系统的响应。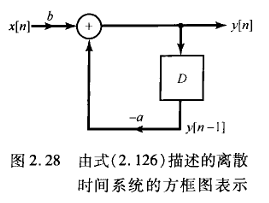
当然除了离散时间的信号满足上面的性质,连续时间信号同样能够用一系列的加权脉冲求和表示,知道连续时间单位冲激响应后我们也可以求得任何一个连续时间信号对于连续时间线性时不变系统的响应。只不过,离散时间是求和,连续时间是积分。
$$ x(t) = \int_{-\infin}^{+\infin}x(\tau)\delta(t-\tau)d\tau $$
对于任何一个t时刻的输入,等于$ x(\tau) $与$ \delta(t - \tau) $乘积在整个时间轴上的求和,虽然只有$ t = \tau $时不等于零。相应的,卷积公式变为:
$$ y(t) = x(t) * h(t) = \int_{-\infin}^{+\infin}x(\tau)h(t - \tau)d\tau $$
同样是要在连续时间的线性时不变系统中才成立。
综上,第二章的内容就介绍到这里。主要介绍了卷积在离散时间和连续时间的表达式以及如何理解。并且给出了卷积在线性时不变系统中如何体现线性时不变系统的几个性质的。如因果性、可逆性等。
Chapter 03:
第三章引入了傅里叶级数,以及如何求得一个信号的傅里叶级数,我们依旧是从连续和离散两个角度来讨论。
首先从我们第二章中,我们学到了线性时不变系统的单位冲激响应,我们现在介绍一个新的响应,特征响应(特征方程)。如果一个信号输入一个复指数信号,由我们前面得到的单位冲激响应可以推导出复指数信号$ x(t) = e^{st} $的响应:
$$ y(t) = \int_{-\infin}^{+\infin}h(\tau)x(t-\tau)d\tau $$
即
$$ y(t) = \int_{-\infin}^{+\infin}h(\tau)e^{s(t-\tau)}d\tau $$
$$ y(t) = e^{st}\int_{-\infin}^{+\infin}h(\tau)e^{-s\tau}d\tau $$
我们将$ e^{st} $提取出来,可以发现系统输出等于输入信号$ e^{st} $与一个$ H(s) $的乘积。我们称常数$ H(s) $(可以是复数)为与特征函数$ e^{st} $有关的特征值。
$$ H(s) = \int_{-\infin}^{+\infin}h(\tau)e^{-s\tau}d\tau $$
上述分析对于离散时间的复指数信号也成立。这样我们可以将系统的输出表示为简单的特征值与输入信号乘积的形式,即$ y(t) = H(s)e^{st}, y[n] = H[z]z^{n} $。
已知特征值只与输入信号的复数值有关,如果我们能够求出系统的特征值函数,并且将输入信号表示为一系列复指数信号的求和,那么我们根据特征函数响应与线性时不变系统的线性性可以求得输出信号。
那么什么信号能够分解为一系列的复指数信号呢?我们在第一章中介绍了周期复指数信号$ x(t) = e^{jw_{0}t} $。那么一系列与$ x(t) $成谐波关系的复指数信号集就是:
$$ x(t) = \sum_{k=-\infin}^{+\infin}a_{k}e^{jkw_{0}t} = \sum_{k=-\infin}^{+\infin}a_{k}e^{jk(\frac{2\pi}{T})t}, k = 0, 1, 2… $$
每一项称为k次谐波。那么若一个周期信号可以表示为上述一系列谐波分量的集合的形式,我们就称为傅里叶级数表示。通过数学公式的变形以及欧拉公式的展开,我们可以得到傅里叶级数的另一个表达形式:
$$ x(t) = a_{0} + \sum_{k=1}^{\infin}(a_{k}e^{jkw_{0}t} + a_{-k}e^{-jkw_{0}t} ) $$
对于实周期的信号常见的傅里叶级数则是:
$$ x(t) = a_{0} + \sum_{k=1}^{\infin}\lvert a_{k} \rvert cos(kw_{0}t+\theta_{0}) $$
回到本篇文章常见的复指数形式的傅里叶级数,我们如何求得傅里叶级数$ a_{k} $呢?对复指数信号集左右同时乘一个$ e^{-jn\omega_{0}t} $并且做一个周期内的积分可以得到:
$$ \int_{0}^{T}x(t)e^{-jkn\omega_{0}t}dt = \int_{0}^{T}\sum_{k=-\infin}^{+\infin}a_{k}e^{jkw_{0}t}e^{-jkn\omega_{0}t}dt $$
等式的右边由于是周期函数,一个周期的积分为零,当且仅当$ k = 0 $时,右边的谐波分量等于1,因此在一个周期内的积分就等于周期$ T $,因此我们可以得到:
$$ a_{k} = \frac{1}{T}\int_{0}^{T}x(t)e^{-jkn\omega_{0}t}dt $$
这就是连续时间周期信号的傅里叶级数的计算方式。如此我们便通过两个方程确定了连续周期信号的傅里叶级数。
$ x(t) = \sum_{k=-\infin}^{+\infin}a_{k}e^{jkw_{0}t} = \sum_{k=-\infin}^{+\infin}a_{k}e^{jk(\frac{2\pi}{T})t}, k = 0, 1, 2… $ (综合方程)
$ a_{k} = \frac{1}{T}\int_{0}^{T}x(t)e^{-jkn\omega_{0}t}dt, k \neq 0 $ (分析方程)
注意:想用傅里叶级数表示一个连续周期信号,需要满足狄利克雷条件
- 在任何周期内,信号$ x(t) $必须绝对可积。信号$ x(t) = \frac{1}{t} $就不满足条件一。
- 任意有限区间内只有有限个起伏变化,即最大最小值数量有限。信号$ x(t) = sin(\frac{2\pi}{t}) $不满足条件二。
- 有限区间只有有限个不连续点。
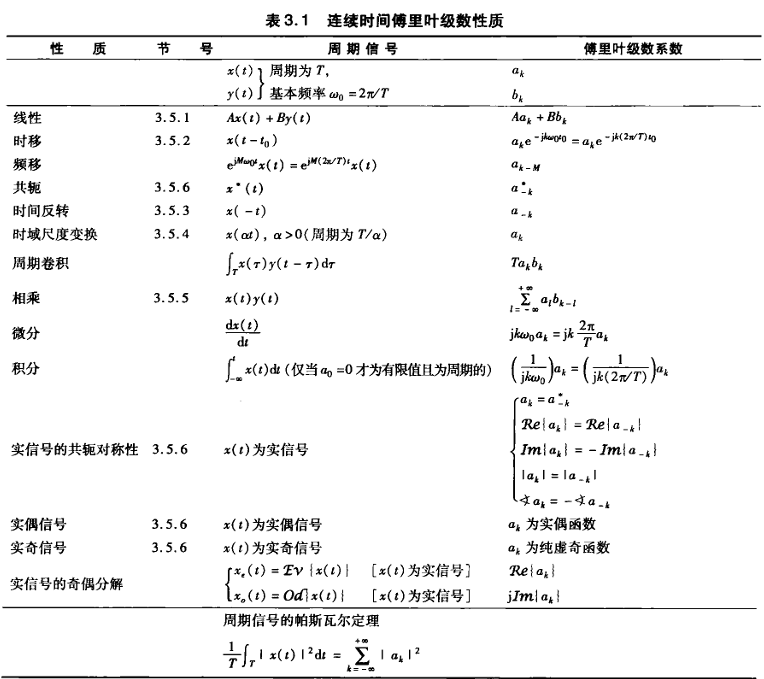
对于连续周期信号的傅里叶级数满足一些性质:
- 线性:加权可加
- 平移:平移后傅里叶系数多了一个跟平移量有关的复指数(幅角变、幅值不变)
- 时间反转:原级数也反转
- 尺度变换:傅里叶系数不变,但是基波频率改变,傅里叶级数改变。
- 相乘:信号相乘,对应傅里叶系数相卷。
- 共轭:当信号是实信号时,傅里叶系数一定共轭对称。若信号是实偶信号,则傅里叶系数也是实偶函数;如果信号是实奇函数,则傅里叶系数也是实奇函数。
- 帕斯瓦尔定理:周期信号的总平均功率等于各谐波平均功率之和
$$ \frac{1}{T}\int_{T}\lvert a_{k}e^{jk\omega_{0} t} \rvert^{2}dt = \frac{1}{T}\int_{T}\lvert a_{k}\rvert^{2}dt = \lvert a_{k}\rvert^{2} $$
具体总结详见下表:
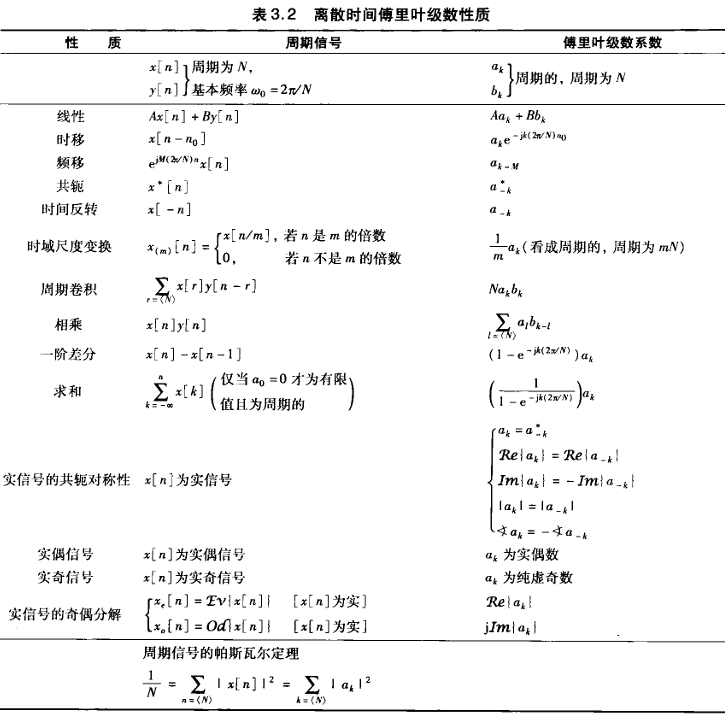
对于离散周期的信号仍然有上述的性质,两者几乎相同:
$ x[n] = \sum_{k=(N)}a_{k}e^{jkw_{0}n} = \sum_{k=(N)}a_{k}e^{jk(\frac{2\pi}{N})n}, k = 0, 1, 2… $ (综合方程)
$ a_{k} = \frac{1}{N}\sum_{n=(N)}x(t)e^{-jk(2\pi/N)n}, k \neq 0 $ (分析方程)
上述综合方程与连续时间不同的原因是,连续周期信号可以有无限多的谐波分量,因为t是连续的,$ \omega $不断增大对应的谐波分量也不同。而离散时间不一样,像第一章讨论的一样,离散周期信号的复指数谐波信号集里面只有N个信号是不同的,相差$ 2\pi $的复指数信号完全相同。
而且,由于离散周期信号是由有限个复指数谐波信号集组成的,因此离散周期信号的能量有限,不需要考虑信号收敛的问题。离散傅里叶级数的性质见下表:
以上就是我对信号与系统Chapter01 至 Chapter03的全部心得体会以及总结。